
Monocular Localization of a moving person onboard a Quadrotor MAV
- Hyon Lim ,
- Sudipta Sinha
2014 IEEE International Conference on Robotics and Automation (ICRA) |
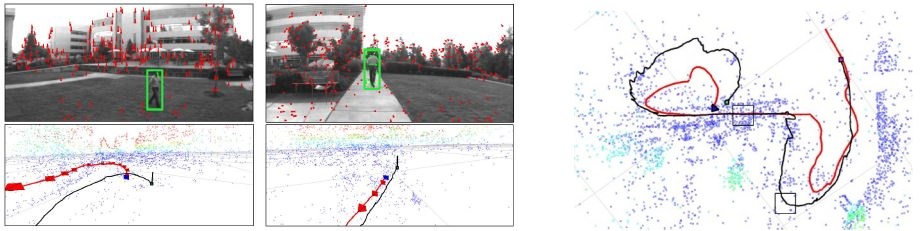
In this paper, we propose a novel method to recover the 3D trajectory of a moving person from a monocular camera mounted on a quadrotor micro aerial vehicle (MAV). The key contribution is an integrated approach that simultaneously performs visual odometry (VO) and persistent tracking of a person automatically detected in the scene. All computation pertaining to VO, detection and tracking runs onboard the MAV from a front-facing monocular RGB camera. Given the gravity direction from an inertial sensor and the knowledge of the individual’s height, a complete 3D trajectory of the person within the reconstructed scene can be estimated. When the ground plane is detected from the triangulated 3D points, the absolute metric scale of the trajectory and the 3D map is also recovered. Our extensive indoor and outdoor experiments show that the system can localize a person moving naturally within a large area. The system runs at 17 frames per second on the onboard computer. A walking person was successfully tracked for two minutes and an accurate trajectory was recovered over a distance of 140 meters with our system running onboard.
© IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other users, including reprinting/ republishing this material for advertising or promotional purposes, creating new collective works for resale or redistribution to servers or lists, or reuse of any copyrighted components of this work in other works.