Building Scale VR: Automatically Creating Indoor 3D Maps and its Application to Simulation of Disaster Situations
It is useful to simulate disaster situations by reconstructing actual buildings in a virtual space to enable people using the buildings to learn how to act in a disaster situation before it occurs. Therefore, we are developing a disaster-simulation system that simulates various disaster situations by virtually reproducing the situation inside buildings to allow individuals to experience disaster situations by using the latest virtual reality (VR) system. We use a mobile robot equipped with a laser-range sensor that measures the distance to objects in a building, an RGB depth camera to collect distance and image data while the robot automatically travels along a route suitable for 3D measurement, and a 4K panoramic image camera that captures high-quality color data. The robot can also scan physical objects individually by moving around it automatically. We then arrange the objects in a 3D map and manipulate them. We have also developed a VR system called “Building-Scale VR” that consists of indoor 3D maps filled with manipulable virtual objects that we call “operation targets” and a VR headset capable of position tracking within the building. In this talk, we explain how to implement Building-Scale VR and its applications to disaster simulations. It is useful to express disaster situations by reconstructing actual buildings into virtual space and enable users in the building to experience such situations beforehand to learn how to properly act during a disaster.
- Series:
- Microsoft Research Talks
- Date:
- Speakers:
- Katashi Nagao
- Affiliation:
- Nagoya University
-
-
Sing Bing Kang
Principal Researcher
-
-
Series: Microsoft Research Talks
-
-
-
-

Galea: The Bridge Between Mixed Reality and Neurotechnology
Speakers:- Eva Esteban,
- Conor Russomanno
-

Current and Future Application of BCIs
Speakers:- Christoph Guger
-

Challenges in Evolving a Successful Database Product (SQL Server) to a Cloud Service (SQL Azure)
Speakers:- Hanuma Kodavalla,
- Phil Bernstein
-
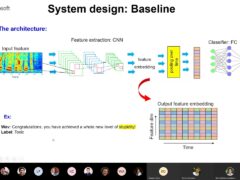
Improving text prediction accuracy using neurophysiology
Speakers:- Sophia Mehdizadeh
-
-
DIABLo: a Deep Individual-Agnostic Binaural Localizer
Speakers:- Shoken Kaneko
-
-

Recent Efforts Towards Efficient And Scalable Neural Waveform Coding
Speakers:- Kai Zhen
-
-
Audio-based Toxic Language Detection
Speakers:- Midia Yousefi
-
-
From SqueezeNet to SqueezeBERT: Developing Efficient Deep Neural Networks
Speakers:- Sujeeth Bharadwaj
-

Hope Speech and Help Speech: Surfacing Positivity Amidst Hate
Speakers:- Monojit Choudhury
-
-
-
-
-
'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
Speakers:- Peter Clark
-
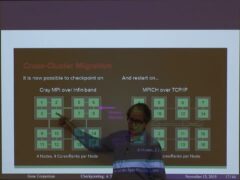
Checkpointing the Un-checkpointable: the Split-Process Approach for MPI and Formal Verification
Speakers:- Gene Cooperman
-

Learning Structured Models for Safe Robot Control
Speakers:- Ashish Kapoor
-
-