Emergency Informatics and the Survivor Buddy Project
- Robin Murphy | Dept of CS & Engineering, Texas A&M University
This talk will introduce the field of emergency informatics: the real-time collection, processing, distribution, and visualization of information for prevention, preparedness, response and recovery from disasters. One aspect of emergency informatics is the use of robots for search and rescue. While to date rescue robots have not encountered a survivor, we have been working since 2002 with medical responders to determine the informatics needs of remote victim management. One resulting research direction is the Survivor Buddy, a human-robot interaction project between Texas A&M, Stanford, and the University of South Florida. The Survivor Buddy is motivated by the delay of 4-10 hours before rescue teams can physically reach a survivor found deep in rubble; if a robot finds a survivor, the person will be dependent on the robot as a link to the outside world for a long period of time. Our prior work suggests that a survivor will treat the robot as a social medium, that is, the robot will be both a medium to the “outside” world and a local, independent entity devoted to the victim (e.g., a buddy). One function of the medium is to provide two-way audio communication between the survivor and the emergency response personnel, but more interesting capabilities emerge by fully exploiting web applications. For example, responders could play therapeutic music with a beat designed to regulate heartbeats or breathing. Under funding from Microsoft, we are building a web-enabled robot with a LCD screen that can permit the survivor to videoconference with responders (or family), watch live TV, movies, or listen to music. The web-enabled, multi-media Survivor Buddy will allow i) the survivor to take some control over the situation and find a soothing activity while waiting for extrication and ii) responders to support and influence the state of mind of the victim.
Speaker Details
Robin Roberson Murphy received a B.M.E. in mechanical engineering, a M.S. and Ph.D. in computer science in 1980, 1989, and 1992, respectively, from Georgia Tech, where she was a Rockwell International Doctoral Fellow. She is the Raytheon Professor of Computer Science and Engineering at Texas A&M. Her research interests are artificial intelligence, human-robot interaction, and heterogeneous teams of robots. In 2008, she was awarded the Al Aube Outstanding Contributor award by the AUVSI Foundation, for her insertion of ground, air, and sea robots for urban search and rescue (US&R) at the 9/11 World Trade Center disaster, Hurricanes Katrina and Charley, and the Crandall Canyon Utah mine collapse. She is an associate editor for IEEE Intelligent Systems, a Distinguished Speaker for the IEEE Robotics and Automation Society, and has served on numerous boards, including the Defense Science Board, USAF SAB, NSF CISE Advisory Council, and DARPA ISAT.http://faculty.cs.tamu.edu/murphy/
-
-

Jeff Running
-
-
Watch Next
-

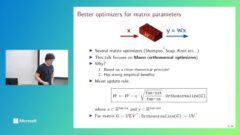
Dion2: A new simple method to shrink matrix in Muon
- Anson Ho,
- Kwangjun Ahn
-
-
-
-
-
-
-
Beyond Swahili: Designing Inclusive AI for Bantu Languages
- Alfred Malengo Kondoro
-
-