Virtual Coupling Schemes for Position Coherency in Networked Haptic Virtual Environments
- Ganesh Sankaranarayanan | University of Washington
In networked haptic environments — used in surgical simulation training, maintenance task training, force-feedback enabled network games, etc.— multiple users remotely collaborate sharing the same virtual space. In these environments, maintaining position coherency between the copies of the virtual object is vital to achieve consistency in collaboration, especially in the presence of time delays between users. To this end, client-server architectures are widely used to maintain position coherency in networked haptic environments. However, this approach introduces round trip delays for each user and, in addition, the collaboration becomes dependent on the ability of the client to maintain communication with the server. On the other hand, in peer-to-peer architectures — where the information from each user is multicasted to all the other users — time delay is reduced in half compared to client-server based methods. Nevertheless, this is the most difficult method for maintaining position coherency. In this work we present three virtual coupling schemes introduced to maintain position coherency, two of which utilize a peer-to-peer architecture and the remaining one, a client-server method. Their performances were compared for both constant and time-varying delays using the Internet, with experimental results that demonstrate that one of the virtual coupling schemes has a comparable performance to the server-based method. From this work we prove that peer-to-peer architectures are particularly useful in applications that use networked haptic environments.
Speaker Details
Ganesh Sankaranarayanan received his B.E. in Electrical Engineering with distinction from Annamalai University in 1997, M.S in Electrical Engineering from the University of Texas at Arlington in 2002 and Ph.D. in Electrical Engineering from the University of Washington in December 2007. Before graduate studies, he held an engineering position in designing control systems for web offset printing machinery. In Seattle, he pursued thesis research in networked haptic virtual environments. He has also worked on teleoperation of surgical robots, Internet based teleoperation and tangible augmented interfaces. He is also a research associate at the Human Interface Technology Laboratory (HitLab) at the University of Washington. He will be joining as a postdoctoral research associate at the advanced computational research laboratory, Rensselaer Polytechnic Institute.His current research interests include multi-user haptic virtual environments, haptic rendering, surgical robotics, telerobotics and surgical simulation.
-
-

Jeff Running
-
-
Watch Next
-
-

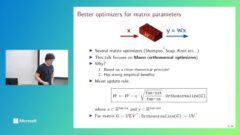
Dion2: A new simple method to shrink matrix in Muon
- Anson Ho,
- Kwangjun Ahn
-
-
-
-
-
-
-
-