Large-scale 3D Reconstruction from Video
- Drew Steedly | College of Computing, Georgia Institute of Technology
This talk examines methods for estimating scene structure and camera motion from very long video sequences. We propose a novel method for incrementally augmenting a reconstruction as new images or measurements become available.
The efficient update of very large reconstructions can be cast as a dimensionality reduction problem. Dimensionality reduction is possible by rigidly locking together sets of cameras and has two important properties. During optimization, only measurements that span partitions need to be considered, and the sparsity of the system is preserved. These properties are essential for updating a reconstruction in a scalable manner.
We will discuss principled ways of partitioning cameras into rigid sets as well as methods to initialize and maintain a hierarchical partitioning. In our current research, we are examining how the dimensionality reduction can be adapted to new measurements by choosing cuts through the hierarchy.
Speaker Details
Drew Steedly is a PhD Candidate in the College of Computing, Georgia Institute of Technology, where his research focuses on efficient techniques for generating 3D reconstructions of large environments from video. He joined the Georgia Tech GVU Center’s Computational Perception Lab in 1998 where he is working with Professor Irfan Essa and hopes to complete his dissertation in Summer of 2004. He received a B.S. in Electrical Engineering from the University of Florida in 1994. He earned his M.S. in Electrical and Computer Engineering from Georgia Tech in 1995 with a focus in analog IC design. After his M.S. he worked at Integrated Device Technology designing integrated circuits and developing design methodologies, where he still consults and helps with various design projects. Drew was a recipient of the 2001-2002 Intel Foundation Graduate Fellowship.
-
-

Jeff Running
-
Watch Next
-
-
-

Microsoft Transforms its Cloud Supply Chain with Optimization and Generative AI
- Peter Lee,
- Konstantina Mellou,
- Kayla Kummerlowe
-
-

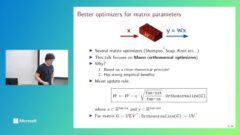
Dion2: A new simple method to shrink matrix in Muon
- Anson Ho,
- Kwangjun Ahn
-
-
-
-
-