Microsoft Indoor Localization Competition – IPSN 2018
Location: Porto, Portugal
Registration Deadline: All teams must submit a 2-page abstract by February 11th 2018. For more details, please read the Call for Contesters.
Contact: For questions and clarifications, please contact Dimitrios Lymberopoulos at: dlymper@microsoft.com
Sponsors
![]()
![]()
Organizers:
- Dimitrios Lymberopoulos (opens in new tab) (Microsoft Research)
- Jie Liu (opens in new tab) (Microsoft Research)
- Vitor Sequeira (European Commission – Joint Research Center)
- Vivek Jain (Robert Bosch LLC)
- Niki Trigoni (opens in new tab)(University of Oxford)
- Anthony Rowe (opens in new tab)(Carnegie Mellon)
- Nader Moayeri (NIST)
The slide deck that was used during the official results announcement session can be found HERE (opens in new tab).
The detailed ground truth measurements and error visualization for each team, as well as the 3D point cloud of the evaluation area can be found HERE (opens in new tab). Each team is assigned a short acronym comprised of 2-4 letters. There is an excel file for each category (2D and 3D) that maps the full submissions to these acronyms. Important note: these results have been further refined since the official announcement of the results to better synchronize the system under test and the ground truth system. As a result, some teams might see slight differences in the reported accuracies in this data when compared to the graphs below. These differences have no impact on the ranking of the top teams. Ranking only changed for a few teams towards the tail.
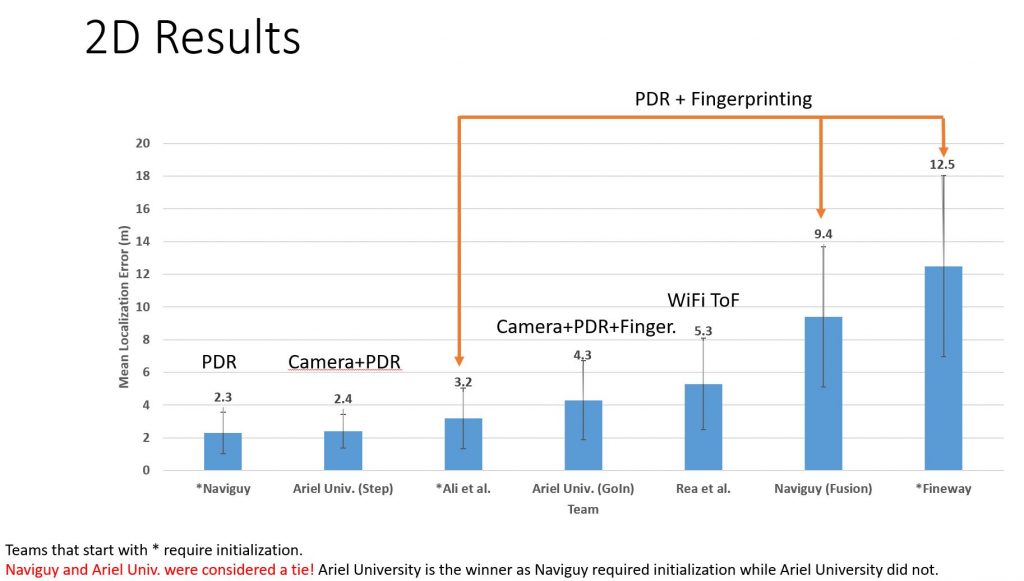
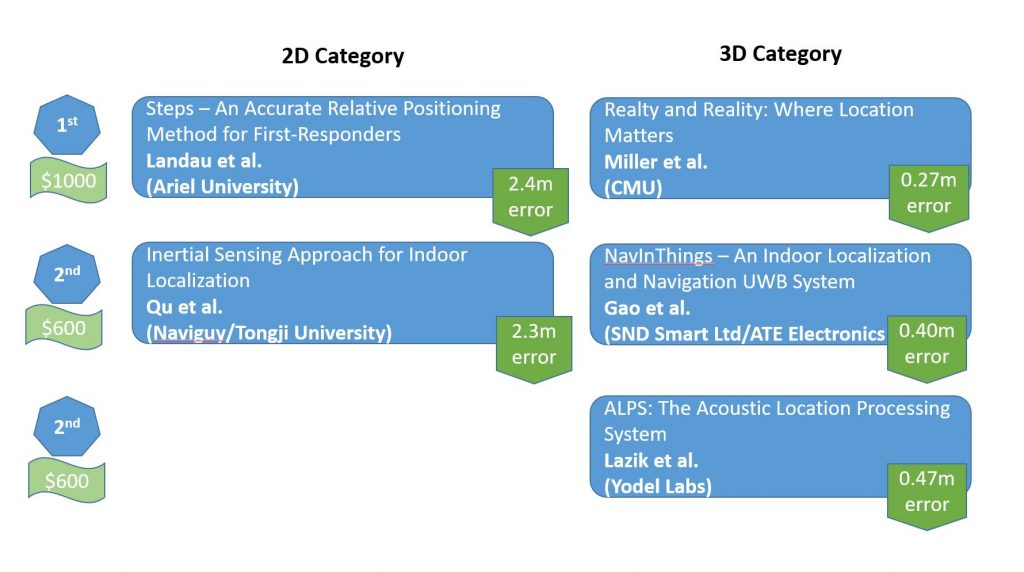
Note 1: Organizers considered Naviguy and Ariel University to have the same accuracy as the difference of 10cm is well within the error of this type of technologies. Given that Naviguy had to be explicitly initialized to a known location at the beginning of the evaluation, Ariel University takes the first place, and Naviguy the second place.
Note 2: Given that we had only 7 submissions in the 2D category, only the top 2 teams are eligible for awards.
Note 3: Rea et al. had 2 of their 10 APs fail during the evaluation. In addition, they used the wrong system configuration during evaluation. After fixing some of the issues, and re-processing the data after the competition, the team reported an improved accuracy of 3.39m.
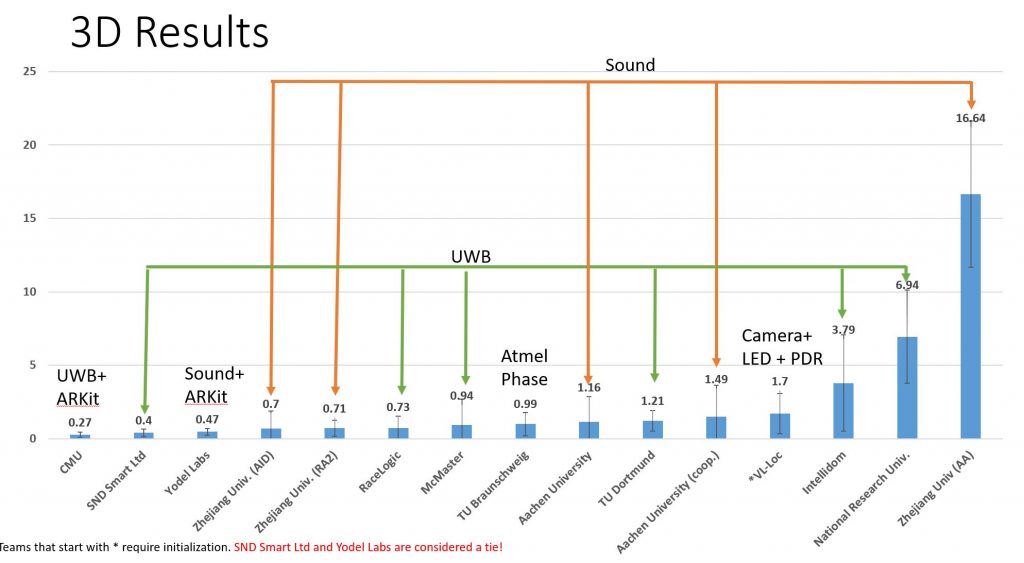
Notes: Organizers considered SND Smart Ltd and Yodel Labs to have the same accuracy.
This is the final list of winners and their prizes: