

2017 Microsoft Indoor Localization Competition @ IPSN 2017
Location: Pittsburgh, PA, USA
Registration Deadline: All teams must submit a 2-page abstract by January 27th 2017. For more details, please read the Call for Contesters.
Contact: For questions and clarifications, please contact Dimitrios Lymberopoulos at: dlymper@microsoft.com
Sponsors
![]()
![]()
Organizers:
- Dimitrios Lymberopoulos (opens in new tab) (Microsoft Research)
- Jie Liu (opens in new tab) (Microsoft Research)
- Maurizio Bocca (Bosch)
- Vitor Sequeira (European Commission – Joint Research Center)
- Niki Trigoni (opens in new tab)(University of Oxford)
- Xue Yang (Intel)
- Ying Zhang (Google)
- Anthony Rowe (opens in new tab)(Carnegie Mellon)
Important notes on the official results:
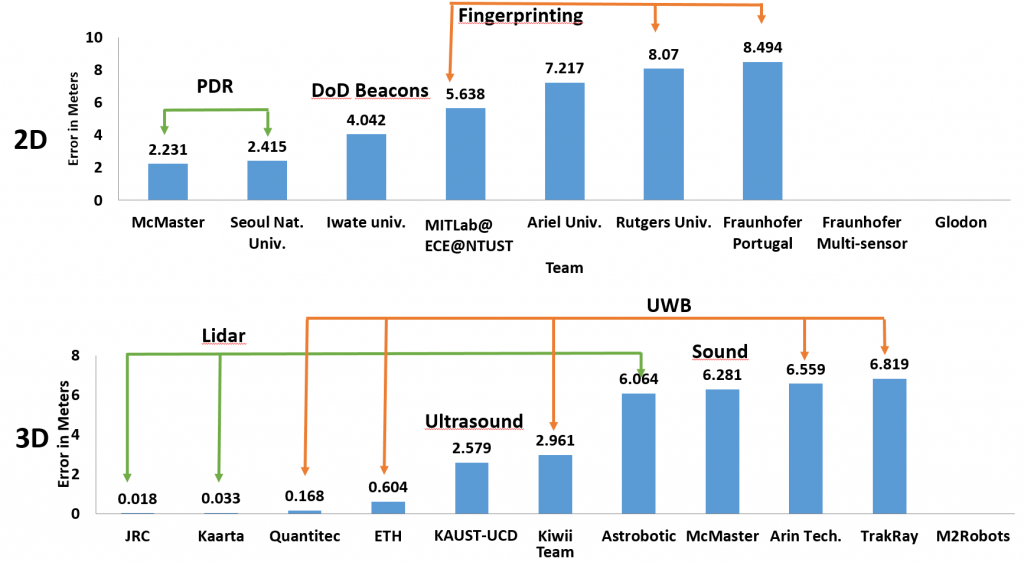
- The JRC (European Commission Joint Research Center) team was NOT competing. This team helped with the organization of the event. In particular, they used 3D laser scanners to map the evaluation area and measure ground truth coordinates for all evaluation points. The accuracy reported for this team is based on their mobile lidar-based system (different than the ground-truth measuring system) that won the 2015 Microsoft Indoor Localization Competition. Even though not officially competing, we provide this system’s results for awareness.
- The team from Kiwii logged the estimated locations for two of the points while swapping X and Y coordinates. This resulted into a higher average localization error. When this mistake is taken into account, the average localization error for this team is within 2m.
2017 Microsoft Indoor Localization Competition (opens in new tab) (Slides used to announce the results during the Indoor Localization Session)
2017CompetitionOfficialResults (opens in new tab) (Raw data including the ground truth coordinates and estimated locations for every team)
The JRC team that helped with ground truth measurements has decided to make the collected point cloud available to the public. You can find the data here (opens in new tab).