
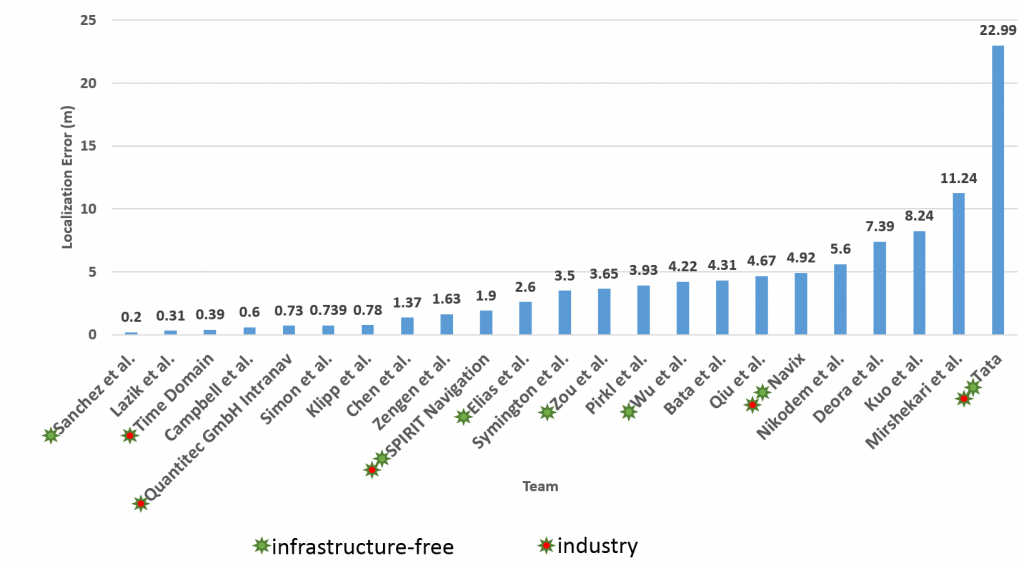
28 teams out of the 48 teams that submitted an abstract actually showed up in Seattle for the competition. 5 teams faced technical difficulties that prevented them from getting evaluated. As a result, 23 teams were actually evaluated. The average localization error across all 20 evaluation points for each team can be seen below:
The slide deck with the final results can be found HERE.
The FULL evaluation data can be found HERE.
-
The top 3 teams in each of the two categories are as follows:
We are happy to announce that we have received 48 submissions from 44 teams this year!
Overall, 12 submissions are fully authored or co-authored from industry people. From these 12 submissions, 4 come from startups in the indoor location space. The rest 36 submissions come from academia from all over the world.
There are 30 submissions in the infrastructure-based category (systems that need to deploy custom hardware) and 17 submissions in the infrastructure-free category. However, we are considering introducing additional categories for this year’s competition. The categories and the teams within each category will be announced on this website within the next couple of days.
-
The competition will start on Monday April 13th and finish on Tuesday April 14th. The detailed results of the competition will be presented during the Indoor Location Panel that will take place on Wednesday April 15th from 15:30 to 16:30. The detailed schedule is as follows:
Monday April 13th
8:00 – 8:30am Welcome – Evaluation space and rules overview 8:30am – 15:30 Setup Time 15:30pm – 16:00 All teams leave the evaluation area 16:00 – 18:30 Organizers mark down the evaluation points 18:30 – 20:30 First evaluation wave Tuesday April 14th
8:00am – 12pm Second evaluation wave 12:00pm – 13:00 Lunch 13:00 – 15:00 Third evaluation wave 17:00 – 20:00 Poster Session Wednesday April 15th
15:30 – 16:30 Official results are announced and the winning teams briefly present their systems during the Indoor Localization Competition Panel -
All submissions have been assigned to one of two categories depending on the requirement to deploy custom hardware or not. The list of all submissions in each category can be seen below. Additional categories could be created depending on which/how many teams will actually attend the competition.
Teams in green fonts have at least one member that has officially registered for the competition. These teams will be allowed to compete. Teams in red fonts do not have any members officially registered for the competition yet. All teams in red fonts will not be allowed to compete unless at least one team member officially registers for the competition. The data below will be updated periodically. Latest update: April 12th 2015.
Authors Affiliation Title Wen et al. UK/Australia/China – Univ. of Oxford/Queensland/New South Wales/Tongji University Agile Indoor Positioning with Smart Glasses Clark et al. UK – University of Oxford MonoVision Indoor Positioning Simon et al. Hungary – University of Pannonia Multimodal Indoor Localization System Smirnov et al. Russia – Navigine Indoor Navigation Platform Based on Signals Fingerprinting and Aided IMU Wu et al. Canada – University of Windsor Particle Filter and Extreme Learning Machine Based Indoor Localization System Zou et al. Singapore/USA – Nanyang Technological University/UC Berkeley An Accurate and Reliable WiFi-based Indoor Localization and Navigation System Elias et al. Portugal – Fraunhofer Portugal Research Center Precise Indoor Location Jin et al. China – Dalian University of Technology Indoor Localization via Multiple Sensor Fusion MacLachlan et al. USA – Carnegie Mellon University Applied Indoor Localization: Map-based, Infrastructure-free, with Divergence Mitigatino and Smoothing Marinis et al. Italy – DUNE srl Contextual Processing for Pedestrian Tracking in GPS-denied environments Kolchanov et al. Russia/USA – Skoltech/MIT A Wifi-based Localization System for Mobile Devices Jun et al. India/USA/Singapore – IIT Ropar/Univ. of Cincinnati/Singapore Univ. of Technology and Design/IBM Research Robust and Undemanding WiFi-fingerprint based Indoor Localization with Independent Access Points Herrera et al. Germany/Mexico – Navix Indoor Navigation Navix: Smartphone Multi-sensor, Radio and Probability Map Based Indoor Positioning. Yeung et al. Switzerland/Spain – ETH/IMDEA Networks Institute/Armasuisse Tracking with WiFi Time-of-Flight and Smartphone Inertial Sensors Sarkar et al. India – Tata Consulting Services An Indoor Positioning System using Step Detection and WiFi Trilateration Aquila et al. Italy – GIPStech Srl/University of Calabria A Novel Hybrid/Geomagnetic Field-based Technology for Indoor Navigation Berkovich et al. Russia – SPIRIT Navigation SPIRIT Navigation: Multi-Technology Indoor Localization -
Authors
Affiliation
Title
Evaluation Time Slot
Kuo et al. USA – Univ. of Michigan Indoor Positioning with Mobile Phones and Visible Light Tuesday9:30am Nasser et al. Israel – Univ. of Haifa Home-made Tracking System using Core-sets and the Internet of (Tracking) Things Simon et al. Hungary – Univ. of Pannonia LED-light based Indoor Localization System Monday18:45 Schiller et al. USA – Stony Brook University Device Free Indoor Localization Using Infrared Monday19:00 Klipp et al. Germany – Fraunhofer FOKUS Low Cost High Precision Indoor Localization System Using Inertial and Magnetic Field Sensor Data with Radio Beacons Monday19:15 Zhao et al. China – Microsoft Research Asia Indoor Localization Using BLE MIMO Biehl et al. USA – FX Palo Alto Laboratory LoCo – A Framework for Supporting Highly Accurate Room-level Location Sensing Qiu et al. Taiwan – National Chiao-Tung University Collaborative Localization Using Inter Particle Filter Data Fusion Monday19:30 Inderst et al. Italy – Universita degli Studi Roma/Universita Campus Bio-Medic di Roma Inertial-based Smart Indoor Localization System Chen et al. Singapore/USA – Nanyang Technological University/UC Berkeley An iBeacon Assisted Indoor Localization and Tracking System Tuesday9:00am Campbell et al. USA – Univ. of Michigan DecaWave: Exploring State of the Art Commercial Localization Tuesday9:15am Kempke et al. USA – Univ. of Michigan Pulse Harmonia: Decimeter-Scale Tracking of Small Indoor Objects Dewberry et al. USA – TimeDomain Ultra Wideband Two Way Ranging Localization System Tuesday9:45am Dewberry et al. USA – TimeDomain Ultra Wideband Radar Tagless Indoor Tracking System Selavo et al. Latvia – Institute of Electronics and Computer Science DiStAL: Digitally Steerable Antennas for Localization Tuesday10am Shenoy et al. India – BITS-Pilani Indoor Localization using TDOA Techniques Symington et al. USA/UK – UCLA/Univ. College London Real-time Indoor Localization using Magnetic, Time of Flight, and Signal Strength Inference Maps Tuesday10:15am Zengen et al. Germany – TU Braunschweig InPhase: A Low Cost Indoor Localization System for IoT Devices Tuesday10:30am Pirkl et al. Germany – DFKI Indoor Localization based on Oscillating Magnetic Fields Tuesday10:45am Mirshekari et al. USA – Carnegie Mellon University Step-Level Person Localization Through Sparse Sensing of Structural Vibration Tuesday11:00am Lazik et al. USA – Carnegie Mellon University ALPS: An Ultrasonic Localization System Tuesday 11:15am Liu et al. USA – University of Florida Towards Fine-grained Smartphone Localization via Low-complexity Anchors Deora et al. USA – Univ. of Southern California NUSBL: Non-Uniform Sequence Based Localization Tuesday11:30am Abrudan et al. UK – University of Oxford An Indoor Localization System using Low-frequency Magnetic Fields Arumugam et al. USA – Jet Propulsion Lab/Caltech Two-Dimensional Magnetoquasistatic Positioning for Non-Line-of-Sight Tracking Applications Kotaru et al. USA – Stanford Indoor Localization using Commercial off-the-shelf WiFi NICs. Bata et al. Hungary – University of Szeged Indoor Radio Interferometric Localization and Tracking Tuesday13:15 Nikodem et al. Poland – Wroclaw Univ. of Technology/ MT-Silesia Sp. Time of Flight and Geometrical Lateration Algorithms for Accurate Indoor Positioning Tuesday13:30 Pourhomayoun et al. USA – UCLA Low Cost Localization based on Spatial Diversity Sanchez et al. Italy – European Commission, Joint Research Center (JRC) STeAM: Sensor Tracking and Mapping Tuesday13:45 Gunes et al. Germany – Quantitec GmbH IntraNav Tuesday14:00